Для большинства обывателей роботы — это что-то из области научной фантастики, где они похожи на людей, и либо самоотверженно служат создателям, либо идут войной на всё человечество... В реальности всё куда проще и прозаичнее: многие современные роботы с виду напоминают тележки и используются для монотонной физической работы. И молодая ученая из Красноярска прямо сейчас разрабатывает компьютерные алгоритмы, которые помогут таким роботам ориентироваться на местности при помощи видеокамер.
Самый доступный способ навигации
Идея проекта возникла у Марии, когда она заканчивала бакалавриат СибГУ. Она нередко участвовала в соревнованиях по робототехнике, и в какой-то момент задумалась: можно ли использовать видеонавигацию роботов не только для учебных и игровых задач, но и для повседневного применения? Например, при работах на складе?
Ведь если разработать соответствующие алгоритмы — для управления AGV будет достаточно самых обычных видеокамер. В перспективе это позволит создать полностью автоматическую систему навигации, с которой роботы будут выполнять работу без участия человека.
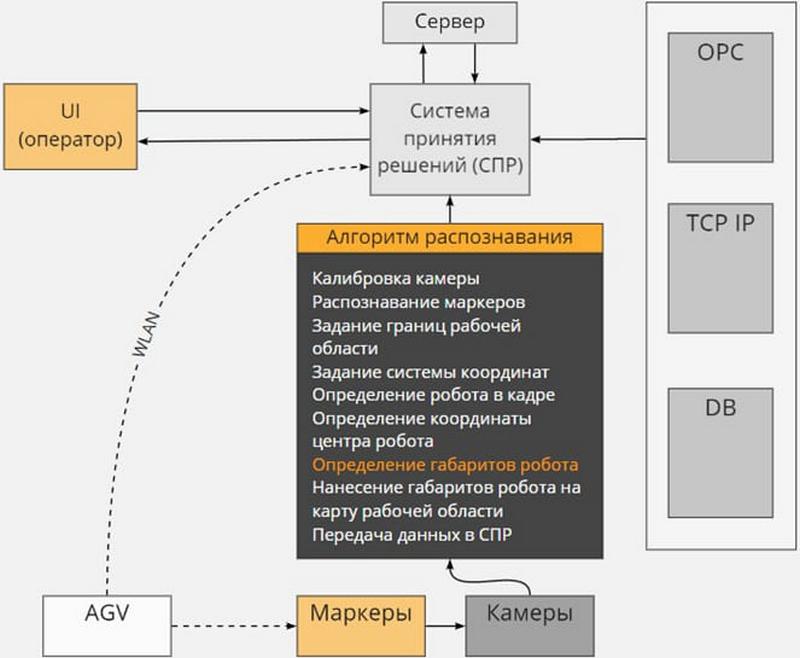
Примерная схема встраивания алгоритма в систему принятия решений автоматизированного склада
Фото предоставлено Марией Лазовской
«Мы разрабатываем дополнение к уже существующей системе навигации роботов для того, чтобы увеличить точность этой навигации. Система анализирует данные с видеокамер, распознает ключевые точки — в нашем случае это Aruco маркеры, которые отмечают границы рабочей области. В этих границах определяется сам робот, который может быть помечен цветовой меткой или же Aruco меткой, для распознавания которых уже существует алгоритм. Дальнейшая работа алгоритма заключается в том, чтобы с учетом местности простроить маршрут робота», — рассказывает Мария.
Aruco-маркеры — это один из самых простых и популярных способов позиционирования робототехнических систем. По сути, это специальные символы, внешне напоминающее QR-коды, которые можно напечатать на бумаге и разместить в нужных местах — например, по периметру рабочей области и на самих роботах. Одни маркеры укажут границы, за которые роботам нельзя выбираться, другими можно отметить стеллажи на складе. Третьи маркеры крепятся на самих роботах, чтобы система их безошибочно узнавала.

Aruco маркеры выглядят, например, так. Их можно даже просто отпечатать на бумаге (как правый нижний), а потом разместить в нужных местах
Фото: habr.com, маркеры из набора команды робототехников setUP
Научный руководитель проекта, Леонид Витальевич Липинский, кандидат технических наук, доцент кафедры системного анализа и исследования операций СибГУ рассказал, что систему видеонавигации можно дополнить и другими средствами — например, GPS-датчиками. Выбор данных с камеры, как главного способа навигации обусловлен практичностью и доступностью видеооборудования.
«Мы пошли по пути видеонавигации, потому что у нее наибольшие перспективы. Во-первых, много чего оснащено видеокамерами, и мы можем это использовать. Во-вторых, видеонавигация позволяет работать с необорудованными роботами. Потенциал системы очень большой: ее можно применять везде, где требуется логистика. Например, в медицинских учреждениях, для доставки медикаментов или перевозки пациентов», — рассказал Леонид Липинский.
Доступная и практичная система видеонавигации может найти свое применение во многих областях промышленности, в медицине... и даже для общественного транспорта. Конечно, полностью автономный AGV-таксопарк — это пока что фантастика, ведь беспилотный автотранспорт пока что так хорошо не развит ни в одной стране. Но в отдаленном будущем возможно всё.
Проект включает в себя самые разные научные области — тут и робототехника, и программирование, и кинематика и многое другое. Мария, как автор проекта, собрала воедино все эти знания, и начала разрабатывать свою систему видеонавигации. Первые успехи не заставили себя ждать.
Как ученому убедить инвестора?
В работе над проектом помогают знания, полученные не только в России — Мария успела побывать в Университете прикладных наук Ульма, в Германии (с ним давно сотрудничает кафедра системного анализа и исследования операций СибГУ). В рамках программы обмена Мария попала в учебную программу International Computer Engineering Program, где, помимо прочего, изучается дисциплина «Машинное зрение» — в рамках дисциплины изучаются типы камер, нюансы захвата видеопотока и алгоритмы обработки кадра. Вернувшись в Россию, студентка продолжила работу над своим проектом.
В 2020 году Мария Лазовская выиграла грант «УМНИК», в рамках которого молодые ученые получают 500 000 рублей на продолжение исследований. Годом ранее она уже подавала заявку на грант — но с первого раза в число победителей попасть не вышло.

Мария Лазовская, автор проекта, студентка 2-го года обучения магистратуры СибГУ
«С технической частью изначально всё было хорошо. Но в финале конкурса проекты оценивает жюри, в котором сидят представители бизнеса, инвесторы. Экономическая часть проекта была плохо продумана, поэтому жюри его не поддержало. Перед следующим конкурсом мы провели несколько проблемных интервью с руководителями и работниками складских помещений и складской автоматизации — для выявления четких проблем. Например, выяснилось, что есть трудности с навигацией, которые можно решить за счет стороннего наблюдения. С нужными для интервью экспертами я познакомилась на мероприятиях Красноярского регионального инновационно-технологического бизнес-инкубатора. Кроме того, акселерационные программы КРИТБИ научили нас, ученых, презентовать свои идеи бизнес-сообществу», — рассказывает Мария Лазовская.
Вторая попытка увенчалась успехом. Полученные средства пошли на покупку оборудования, необходимого для второго этапа исследования. Сейчас начинается самое интересное — если в первый год работы над проектом Мария занималась написанием алгоритма, то теперь пришло время собирать первую лабораторную установку. Чтобы затем протестировать алгоритм на разных типах камер и проверить возможные нюансы. Например, выяснить, как искажение кадра влияет на работу системы.
«Нужно понять допуски системы. Понять, какие интервалы у нас по освещенности, по углам камеры. Чтобы можно было точно определить технические требования к оборудованию», — пояснил Леонид Липинский.
В перспективе создатели рассчитывают на новый грант — например, на «СТАРТ-1» от Фонда инноваций, где можно получить уже 3 млн рублей на создание своей фирмы. Но это в будущем. Сейчас нужно грамотно реализовать средства гранта «УМНИК» и проверить систему в лабораторных условиях.
Источник: https://newslab.ru/article/1066412
